|

- UID
- 863084
|
项目背景及可行性分析
项目名称:基于FPGA的磁悬浮电机数字控制器
项目主要内容:设计了一个基于模糊控制的变参数PID控制器,利用模糊控制的专家推理能力,实时调整PID的系数,以FPGA硬件电路实现算法程序,以改善磁悬浮电机控制系统的控制品质。
项目关键技术及创新点:本设计采用基于模糊理论的PID控制技术。以硬件电路实现算法程序,将原来的电路板级产品集成为芯片级产品,从而降低了功耗,提高了可靠性。
技术成熟性及待解决问题:磁悬浮电机具有体积小、能量消耗小、较短的轴承和更高的临界速度等优点,因此可以预见,磁悬浮电机在空间应用和高速运行领域有着很好的应用前景。基于模糊理论的PID控制技术已基本成熟,其应用也越来越广泛,但单片系统的数字控制系统还没得到很好的解决(例如集成度不高,体积不够小,速度不够快)。
项目实施方案
1.方案基本功能框图及描述
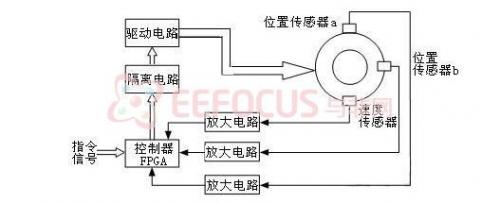
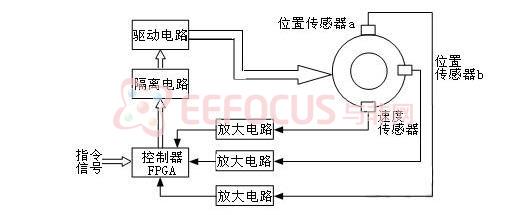
本设计所采用的磁悬浮电机控制系统由磁悬浮电机样机、相应的传感器、信号调理电路、FPGA控制器、隔离电路和驱动电路组成。传感器检测出的转子位移和速度的反馈信号,调理后送到FPGA,经过FPGA芯片内部控制器的处理后输出PWM信号,产生电流,以实现磁悬浮电机的稳定运行。
2.需要的开发平台
拟采用的平台:初级板-Spartan-3E,50万门,Flash,SDRAM,USB2.0,Ethernet,VGA,A/D, D/A。
需要的基本功能:内部PowerPC处理器 DRAM SRAM Flash RS-232 LED指示。
软件部分:用到Ise9.1i和Matlab7.0。
3.方案实施过程中需要开发的模块
具体模块包括数据采集模块、信号调理模块、信号隔离模块。
4.系统最终要达到的性能指标
能实时有效地对目标对象进行控制,整个系统稳定运行。 |
|