�ؼ��ʣ�PFC��ģ ����PFCӦ�� ����ƽ������ģʽ����
ʱ�䣺2021-03-11 11:11:25 ��Դ����ɭ��
�����ڴ洢�ʹ����������ݵķ�������(server farm)�ij������������ǶԸ�Ч�����յ�Ӳ��������ʩ����Ȥ�� ��Դ�����Ա��Ҫ���з���������Ȩ��ѡ���С�����Ƶ�ʡ������������Ȳ�����ͬʱ�Ż�ϵͳ����ָ���繦������(PF)����г��ʧ��(THD)�����ƻ�·��������λԣ�ȡ�
�����ߣ���ɭ���뵼��Ӧ�ù���ʦNikhilesh Kamath
���ڴ洢�ʹ����������ݵķ�������(server farm)�ij������������ǶԸ�Ч�����յ�Ӳ��������ʩ����Ȥ�� ��Դ�����Ա��Ҫ���з���������Ȩ��ѡ���С�����Ƶ�ʡ������������Ȳ�����ͬʱ�Ż�ϵͳ����ָ���繦������(PF)����г��ʧ��(THD)�����ƻ�·��������λԣ�ȡ� ͨ�������ص�Դ�У�����������ϵͳ�и���������棬���磬�ڽ����㲹����ϵ��ת��Ϊ������ʽʱ������ּ��Ϊ��������ƽ������ģʽ���Ʒ���������ƵĹ���ʦ�ṩָ�ϣ����ֿ��Ʒ��������ڴ���PFCӦ���С�
����ͨ��Ҫ������ʱ���ȷ��֮�����Ȩ�⡣ ��С�ķ��沽����������ȷ�Ľ��������Ҫ����ʱ�������ɷ��档 ����̽��ʹ��MATLAB®��ģ500 Wƽ������ģʽ���ƵĹ�������У��(PFC)��·�IJ��裬MATLAB����������SPICE�ĵ�·������� ����ʹ��SimscapeTMElectricalTM���߰��еĹ��ʼ�Ԫ���������濪��ģ�͡� Simscape���߰���Simulink®��̻�������չ���ܣ����ṩ��ģһ������ϵͳ (���������ǵ���ϵͳ) �ı�ݷ����� ������Simulink�����п�����һ��ƽ��ģ��������ϵͳ�ȶ��ԡ� MATLAB���������ݴ�����������ͨ���ű����к����ݼ�¼���Է���ģ�ͽ��в�������������������Ļ������������ߵ�������������Ҫ��
��1����������Դ���ʾ�� [1]
|
���뽻��(AC)��ѹ��Χ |
180 �� 265 VAC |
|
����AC Ƶ�� |
60 Hz (����ֵ) |
|
��������(PF) |
> 0.97�����ص�30% ��100% |
|
��г��ʧ��(THD) |
< 5%�����ص�50%��100% |
|
��Ч |
��ֵ��Ч> 97%�����ص�30% ��100% |
��2������ϵͳ����
|
����AC ��ѹ |
230 VAC |
|
����AC Ƶ�� |
60 Hz |
|
�����ѹ |
384 V |
|
������� |
500 W |
|
��ѹ��� |
500 µH |
|
��������(PWM) ����Ƶ�� |
100 kHz |
|
������� |
220 µF |
|
�������� |
0.62 |
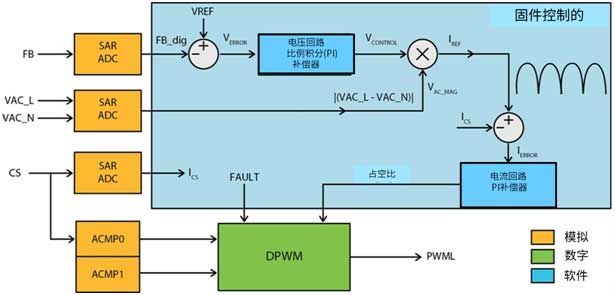
ͼ1������PFC�ļ��ܿ�ͼ
ͼ1�Ǹ�����PFC�ĸ���ͼ�� �ⲿ��ѹ��·���������ѹ (���ѹ)�����ڲ�������·���ĵ������������������бȽ��������γ�������������������ɵ�ѹ��·�����������·��ѹ��˵ó�������ģ��Ƚ������������ڹ������� (OCP)�� ��������˸��ָ����µĵ�ѹ�͵�����·����ΪPFC��ǰ��ת�������������Ӧ�ÿɽӺ㶨���ʡ��㶨������㶨���輶��
��ѹ��·����
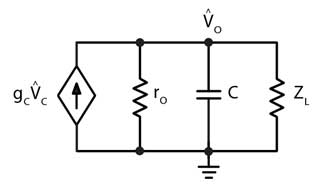
ͼ2����ѹ��������У����·�ļ�С�źŵ�·ģ��
Ray Ridley��ʿ��1987�꿪������ѹ����������·[2]��С�źŵ�·ģ�͡�������������ٵĵ����ο�Դ����·��ѹ�� �������������ѹ����ĸ��ţ��õ�·��Ϊͼ2��ʾ�����磬���Ҷ�������ݺ����Ŀ�������ʽ������![]() -> ����ʽ[1]
-> ����ʽ[1]
����
ZL�Ǹ����迹
rO��С�ź�������裬��![]() �ó�
�ó�
C���������
gC�Ǹ���������![]() �ó�������
�ó�������![]() �����Ե�ѹ��������[2]
�����Ե�ѹ��������[2]
���ں㶨����ĸ��أ�ZL = RL, (rO // ZL) = RL/2:![]() -> ����ʽ[2]
-> ����ʽ[2]
���ں㶨�����ĸ��أ�ZL = ��, (rO // ZL) = rO:![]() -> ����ʽ [3]
-> ����ʽ [3]
���ں㶨���ʵĸ�����ZL = -VO / IO = -rO, (rO // ZL) = ��:![]() -> ����ʽ[4]
-> ����ʽ[4]
�����¹�ϵʽ[2]���뷽��ʽ[2], [3]��[4]��![]()
![]() , ���� M ��ת���ȣ���
, ���� M ��ת���ȣ���![]() �ó�
�ó�
���ǵó���![]() �Ĵ��ݺ�����
�Ĵ��ݺ�����![]() ���ں㶨����ĸ���
���ں㶨����ĸ���![]() ���ں㶨�����ĸ���
���ں㶨�����ĸ���![]() ���ں㶨���ʵĸ���
���ں㶨���ʵĸ���
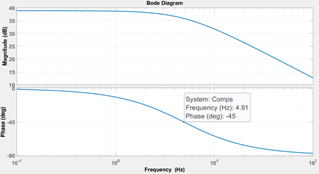
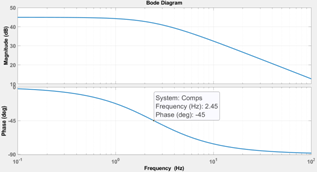
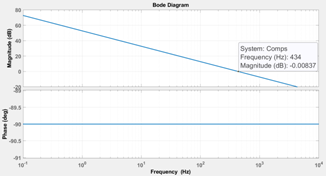
��3��ʾ�ܿض���Ĵ��ݺ���������ϵͳ�����ǣ�C = 220 µF, VIN = 230 VAC, VO = 384 V, RL = 295 Ω, IO = 1.3 A.
��3����ͬ����ģ�͵��ܿض��ݺ���
|
����ģ��: |
�����: |
����ͼ: |
|
�㶨����: |
|
|
|
�㶨����: |
|
|
|
�㶨����: |
|
|
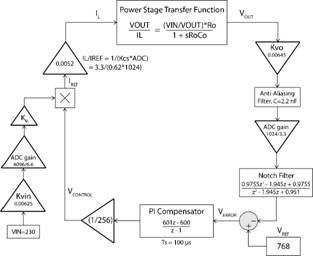
ͼ3���㶨�������ܿ�ģ�͵�ѹ��·��ͼ
ͼ3��ǰ����ʾ�ļ���ѹת�����ĵ�ѹ��·��ͼ��
KVIN�����ⲿ�����ѹ������(����Ϊ160��1)�������������ѹKVO (155��1)��
һ��12λ��αƽ���ģ��ת����(SAR ADC)��ּ���ߵ�ѹ�� -3.3 V �� 3.3 V��Χ�ڵ�ģ���źŽ�ת��Ϊ0 �� 4096��Χ�ڵ���������ЧADC����Ϊ��4096 / 6.6����
��������KM��ʾΪ�����κ�ǰ���������һ���� �ڴ˷����У���ʹ������ǰ����
���ڵ�����⣬ʹ����10λSAR ADC���ⲿ�����������Ϊ0.62�� ��Ϊ�����ṩ�����ֵ�����(IREF)�͵��������(IL)֮��Ĺ�ϵ��
���������ѹ��⣬ʹ����10λSAR ADC��
2.2 nF���������ڷ��������ѹ���ϣ��ṩһ�����ڿ�����ĵ�ͨRC�˲����� ��ѹ���е��ϲ�����= 4160 k���� ��ѹ���е��²�����= 27 k����
�ض�Ƶ���ǣ�
���Dz���10 kHz���ķ�����ѹ��
���ǿ���һ���ݲ��˲���ʹ���Ƶ�ѹ (��ѹ�����������) ������ѹ�ź��ϳ��ֵ�2x����Ƶ���Ʋ�˥���� ���ڲ��ÿ��Ƶ�ѹ�����ڲ�������·���Ƶĵ�����������������ȷ���Ӷ�ʹϵͳ����(PF��THD)���ѡ�
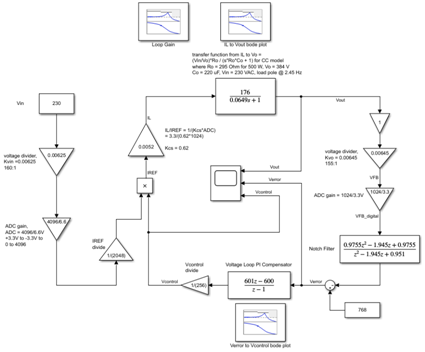
ͼ4���㶨�������ܿ�ģ�͵�ѹ��·Simulink��ͼ
���ں㶨����ģ�ͣ������������λ�������ܿؼ��㴦[2]�� ������ݵĴ�Сͨ��ȡ���ڱ���ʱ��Ҫ�� һ��ľ��鷨����ÿ�� 0.5��1 µF������500 W��ƣ��������Ϊ440 µF�Ǻ����ġ� Ϊ���������ؼ��㣬���������2.5 Hz���� ���ڴ˷��棬ѡ����������Ϊ220 µF�����Ǻ㶨����ģ�ͣ��为�ؼ�����4.9 Hz�������Ǻ㶨�������أ��为�ؼ�����2.45 Hz����
�����ǻ����ܿض��ݺ��������ò�����㣬�����������������ԴﵽĿ�꽻ԽƵ�ʡ�
S��PI����������㲹����2.5 Hz��������0.1 Hz����������40 dB��
ԭ��ļ�������ʽ�ó���
wp = Ki, wz = Ki/Kp
wz = 2*pi*2.5 = 15.7 rad/s
wp = 2*pi*10 = 62.8 rad/s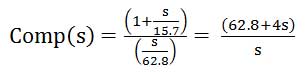
���ڣ�ʹ�ú���ŷ������100 µs�IJ���ʱ�䣺
�� ��ȣ���ϵ���ǣ�
��ȣ���ϵ���ǣ�
B0 = 4.00628, B1 = -4, A1 = -1
����23ʹϵ����-1��+1��Χ�ڡ� Ȼ�����215��
B0 = 4.00628 * 4096 = 16,409.723 = 16410
B1 = -4 * 4096 = -16384
A1 = -1 * 4096 = -4096
���õ��ַ���ʽ��Ϊ��
U(n) = U(n-1) + 16410*E(n) �C 16384*E(n-1) -> �ǵó���212
��
Kpz = 16384, Kiz = 26, ����= 4096
��4��������ͬ�ĵ�ѹ�����������в�ͬ�����λ�ú�DC����
|
����ŷ�����任�� |
���� |
0.1 Hz�������� |
100 Hz�������� | |
|
(a) |
Kpz=16384, Kiz=26, ����=4096 |
2.52 |
40 |
12.1 |
|
(b) |
Kpz=600, Kiz=1, ����=256 |
2.65 |
35.8 |
7.41 |
|
(c) |
Kpz=800, Kiz=1, ����=128 |
1.99 |
41.9 |
15.9 |
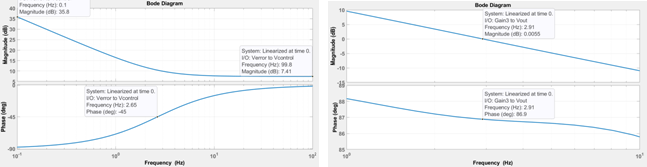
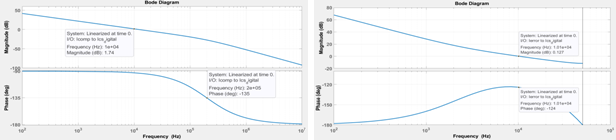
ͼ5��(b)�ĵ�ѹ��·PI����������ͼ�����岨��(180 VAC, �㶨����ģ��)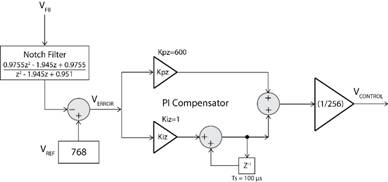
ͼ6��(b)�ĵ�ѹ��·������
��5����ͬ����ģ�ͺͲ������ĵ�ѹ��·��������λԣ��
|
��ѹ������ |
��ԽƵ�ʺ���λԣ�� (PM) | |||||
|
�㶨����ģ�� |
�㶨����ģ�� |
�㶨����ģ�� | ||||
|
180 VAC |
230 VAC |
180 VAC |
230 VAC |
180 VAC |
230 VAC | |
|
Kpz=600, Kiz=1, ����=256, |
1.7 Hz (103º PM) |
3.25 Hz (106º PM) |
2.9 Hz (87º PM) |
4.65 Hz (86.7º PM) |
3.52 Hz (52º PM) |
5.16 Hz (61º PM) |
|
Kpz=800, Kiz=1, ����=128, |
1.98 Hz (112º PM) |
4.49 Hz (112º PM) |
3.51 Hz (94º PM) |
5.92 Hz (92º PM) |
4.15 Hz (63º PM) |
6.4 Hz (70.7º PM) |
|
Kpz=800, Kiz=1, ����=128, |
6.12 Hz (109º PM) |
11.3 Hz (100º PM) |
7.34 Hz (91º PM) |
12.1 Hz (88º PM) |
7.73 Hz (73º PM) |
12.3 Hz (77º PM) |
������·����
��е������ݺ�����С�ź�ռ�ձ���[7]�ó���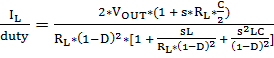
Ӧ�ø�Ƶ����ֵ[7] ��![]()
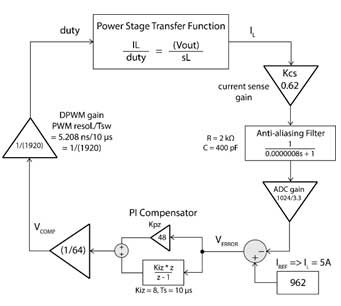
ͼ7��������·��ͼ
ϵͳ����L = 500 µH, VO = 384 V�������У�![]()
ԭ��ļ�����122 kHz��0 dB����Խ
�������������0.62
��ͨRC�˲�������������˲�����
R = 2 kΩ, C = 400 pF
�ض�Ƶ���ǣ�![]()
���������ɣ�IREF:
�������ǵ�ѹ���ƻ�·(VCONTROL)�������˲ʱ���Ե�ѹ���(VLINE)�ij˻���������ˮƽ�渺���������Ӷ����ߡ�
Ϊ�˷���������·�Ķ�̬���ԣ�IREF���ֺ㶨�� ��������ע��·֮�⣬���С�������á�
������������(PWM)���棺
������·������������洢��16λ�ȽϼĴ����С� ģ��Ļ�����ʱ��/������Խ���Ƚ�ֵ������PWM����ͻ��л��� ������ʱ���ֱ���������ʱ�����þ����� PWMʱ������Ϊ192 MHz����Ӧ��5.208 ns��ռ�ձȷֱ��ʡ� �����PWM����Ƶ����100 kHz����ˣ��ȽϼĴ���ֵ1920��Ӧ��100��ռ�ձȡ� ʵ���ϣ���һ�����ռ�ձȣ�����ΪԼ97����
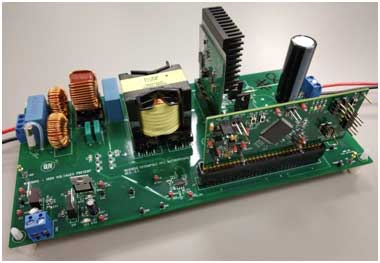
ͼ8��δ������(��ͼ)�Ͳ�����(��ͼ)������·����ͼ
������·��Ŀ�����ͨ��Լ6��10 kHz�� �����δ��������ͼ��Icomp��Ics_digital�������������10 kHz��Ŀ�꽻ԽƵ���£���·�����ѽӽ�0 dB�� ���������������ڸ������ṩ�κ����档 ���ǿɽ�����������õ��㹻�ͣ����ṩ��10 kHz���������λ������
����ϵͳ��һ�ģ����ʹ��һ����PI�������Ϳ����ˣ�����ԭ���һ�������һ������λ�õ���㡣
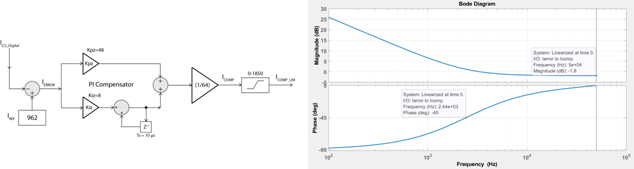
ͼ9��������·PI�������Ͳ���ͼ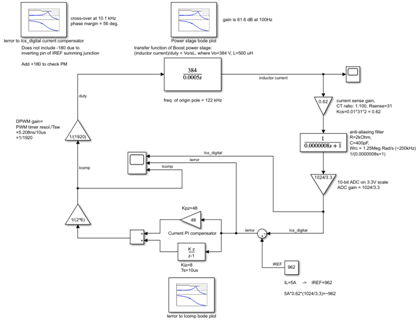
ͼ10��������·Simulink��ͼ
��6������������·�����������в�ͬ���λ�ü��ɴ˲����Ĵ�������λԣ��
|
����������ֵ����1/64 ������ |
���� |
��ԽƵ�ʺ���λԣ�� | |
|
ʾ��(a) |
Kpz=48, Kiz=1 |
328 |
9.24 kHz, 69 deg. |
|
ʾ��(b) |
Kpz=48, Kiz=4 |
1270 |
9.56 kHz, 63 deg. |
|
ʾ��(c) |
Kpz=48, Kiz=8 |
2440 |
10.1 kHz, 56 deg. |
|
ʾ��(d) |
Kpz=48, Kiz=12 |
3500 |
10.7 kHz, 50 deg. |
����ѡ��ĵ�����·PI��������ʾ��(c)��Kpz=48, Kiz=8���� 1/64 ������
Simscapeģ��
������ƺò������ɽ�����������ͼ11��ʾ��Simscapeģ���У��Թ۲���̬���Ρ�����������Ʋ��������ѹ�Ʋ���˲̬���ܵȡ��˲�������Ե������䵽THDģ���Դ��Ժ���ʧ�档
ͼ11��Simscape ģ��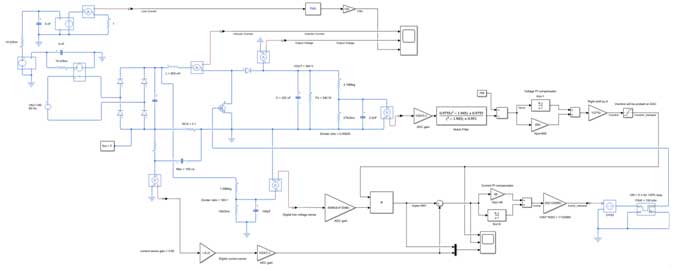
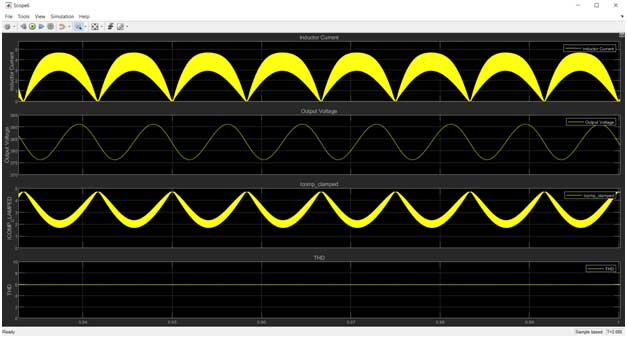
ͼ12��Simscape����
ͼ12��ʾ����̬ʱ�ķ��沨�Σ���е����������ѹ��������·�������������THD��
ʵ����֤
����������ͼ13��ʾ��500 Wͼ��������PFC������ܡ�ͼ����PFC��������ͨ����������ģʽ(CCM)��ѹPFC���ȶ��Է����Ͳ�����������졣
ͼ13��500 Wͼ����PFC������
ͼ14��180 VAC, 540 W, 60 Hz, PF=0.995, THD <3%
ͼ14��ʾʾ��������ĵ�������ź� (��ɫ)�����ؽڵ�(��ɫ)������֧·PWM������� (��ɫ����ɫ)��

ͼ15��180 VAC, 500 W
ͼ15��ʾʾ��������ĵ�������ź�(��ɫ)�������ѹ(��ɫ)������֧·�ͱ�����SRLO (��ɫ)����ѹ��·���������(Vcontrol DAC����ɫ)��
ͼ16������ͼ����������180 VAC��500 W, �㶨����ģʽ�IJ���ֵ�ĶԱ�
ͼ16������Simulink�����Ԥ�ڴ�������λԣ����ʹ��Ƶ�����ǵ�ʵ�ʲ���ֵ�����˱Ƚϡ� ͼ�����Ǻϡ�
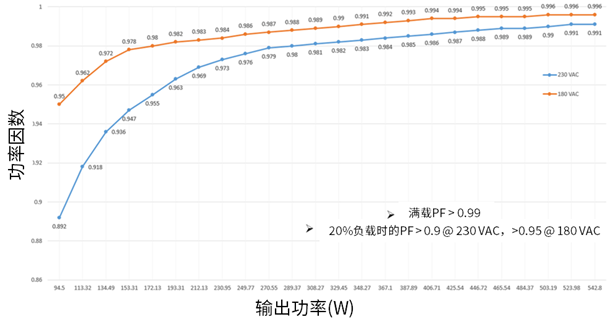
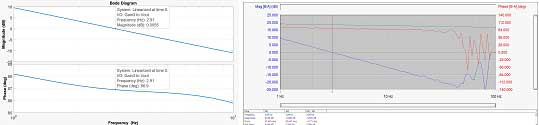
ͼ17�����������Ա��������
ͼ17��ʾ����180 VAC��230 VAC���ֲ�ͬ���Ե�ѹˮƽ����ͬ�����µĹ���������
�ܽ
Simulink��Simscape�����ڷ���500 W��������ԴӦ�õ�ƽ������ģʽ���ƵĹ�������У����·�� ������һ��ԭ�Ͱ�����֤����ѡ�ķ��������
��������
����ϲ��