���ʼDZ����ԶԼ����������������������������CPUʱ��Ƶ�ʺ͵�Դ������ͬʱ������CPUǨ�Ƶ�����ϸ���߿����գ���Դ��ѹѸ�ٽ��͡���CPUʱ��Ƶ�ʳ���1GHzʱ���ں˵�Դ�����״γ���20A����С��Դ��ѹ����1V���¡�����������Ƴ����ƶ�CPUҪ���ں˵�Դ�����ߴ�25A����ijЩ����£���Դ�������ܳ���30A��Ӣ�ض��ƶ�ʽ��ѹ��λ ��IMVP���淶�Ѱ䲼����Ӧ����Щ�µ��ƶ�ʽ��������ԴҪ��
�����ߣ�Wei Chen, Peter Guan
�ʼDZ����ԶԼ����������������������������CPUʱ��Ƶ�ʺ͵�Դ������ͬʱ������CPUǨ�Ƶ�����ϸ���߿����գ���Դ��ѹѸ�ٽ��͡���CPUʱ��Ƶ�ʳ���1GHzʱ���ں˵�Դ�����״γ���20A����С��Դ��ѹ����1V���¡�����������Ƴ����ƶ�CPUҪ���ں˵�Դ�����ߴ�25A����ijЩ����£���Դ�������ܳ���30A��Ӣ�ض��ƶ�ʽ��ѹ��λ ��IMVP���淶�Ѱ䲼����Ӧ����Щ�µ��ƶ�ʽ��������ԴҪ��
�������ص����� LTC3714 �� LTC3716 ������רΪ���� IMVP �淶����ơ�LTC3714 ��һ���㶨�ĵ�ͨʱ�䣬�� R����™������ģʽ�����������������ƶ��ı�Яʽ�����Ӧ�á�LTC®3716 ��һ��˫�����ģʽ��������רΪ�������ܵı�Яʽ�����Ӧ�ö���ơ�
IMVP2 ������ 5 �� VID λ�⣬����Ҫ���������ź������ͬ�IJ���ģʽ������Ż�ģʽ ��BOM���������Ż�ģʽ ��POM�������˯��ģʽ ��DPSLP�� �����˯��ģʽ ��DPRSLP������BOM��DPSLP��DPRSLPģʽ�£������ѹ�����Խ�ʡ���������IMVP��Ҫ����õ�ѹ��λ������������ȵؼ���������ݵ�������ͬʱ�ڴ�����ٵĸ���˲���ڼ䱣���ϸ��������ڡ�LTC3714 �� LTC3716 ����ʵʩ��Դ��ѹ��λ���� ��AVP��������������ô�ͳ����Դ�´������������ܶ���Ĺ�����ġ�
������˫��
��ͳ�ĵ���������ʹ�õ���ͬ����ѹ��·����ѹ��ػ����������루�ߴ�21V��ת��Ϊ��ѹ��0.7V�C1.8V��CPU�ں˵�Դ���ý�����������ڲ������MOSFET����ʹ�ñ��صĵ�������ṩ����ĸߵ�����Ȼ���������·����ߵ�ѹʱ�����������MOSFET��������ǿ�Ȳ�������Ч��������������ĸߵ���MOSFET�����������dV/dt�������⡣�ɴ˲����� MOSFET �й�����Ĺ������� CPU ��������Ӧ���������̵������ʱ�䡣����Ҫ���ǣ�Ƶ����dV/dt�����ᵼ��MOSFET�������Թ��ϡ��������MOSFET��©����·��Դ����ʧЧ����������ѹ��ֱ��ʩ�ӵ�CPU���Ӷ��ƻ�ϵͳ��
ʹ�ýϸߵĿ���Ƶ�ʿ���߸���˲̬��Ӧ�ٶȣ���Ҳ������ϵ͵�Ч�ʣ����Ե�Դʩ�Ӹ��ߵ���Ӧ���������·�е���������Ʋ�����ԼΪ������ص�����30%�C50%�����������Ϊ25Aʱ�����ĵ�Դ�������Ʋ�����ԼΪ8A��Чֵ.����Ĵ�������������˵�Դ�ijߴ�ͳɱ������δ��ȷ�˲������Ʋ����������̵������ʱ�䡣���⣬�ߵ�����25A����е������߶ȱ�ô�����������ܣ���Ҫ����ĵ�ESR����������������ص�����Ծ��������к��̵�PCB�����еĵ���ӵ��������ɿ������⡣��ˣ���������������Ч�ʵ���������Ӵ��һᵼ�³��ڵĿɿ������⡣����Ŀǰ�Ĺ���������������CPU��Դ��������20A�������������Dz����еġ��ڴ�Ӧ���У����������Ǹ��õ����������
˫��ܹ���������ͬ����ѹ�������ṩ�����ߵ��������������ѹ����ʱ�Ӵ��ཻ��180�ȣ����µ�Դ�������������ϵ��Ʋ������������ɴ˲����������Ʋ���������������С��������ݳߴ粢�ӳ��˵�����������⣬��������Ʋ���������������ʹ�ýϵ�ֵ�ĵ��������������С�ĵ�����ڸ���˲���ڼ���Ч�ز�������ˣ��ڲ����ӿ���Ƶ�ʵ������ʵ���˸���ĸ���˲̬��Ӧ�͵���ѹ���ʡ��������ڻ�ø߹���ת��Ч�ʣ�������ȵ��ӳ��������ʱ�䲢����CPU��������Ӧ�������ڵ�����������ͬ��ͨ��֮��ƽ�����䣬�������ȷֲ�������ǿ��PCB�ij��ڿɿ��ԡ�����ÿ��������������ܵ�����һ�룬���ÿ��������ĸ߶�Ҫ���������͡�ͨ���ʵ�������Ż�������ܹ�����ʵ�ָ��ߵ�Ч�ʡ����͵����κ��ͳɱ��Ľ��������
LTC3714 ���� IMVP �������
LTC3714 רΪΪ�����ƶ��ԵıʼDZ����� CPU �������ơ�LTC3714 �ĺ㶨��ͨʱ��ܹ����� 4V �� 36V �Ŀ������ѹ��Χ�����ӵ�ص�Դ���������ں˵�ѹ��һ����ѹ����ߴ� 1MHz �Ŀɱ��Ƶ�ʻ����������Աѡ���С�ĵ�����͵�������ʵ�ָ�Ƶ���������ڸ߹��ʲ��������ԶԽϵ͵�Ƶ�ʽ��б�̣��Ӷ����Ч�ʲ�����MOSFETɢ�ȡ������ģʽ����ȷ����ÿ�������ڿ��Ƶ������Ӷ�ʵ�ֳ�ɫ����·���ص����ʡ��ڲ����� MOSFET �������ܹ���Ч�ز��������������� MOSFET���Ӷ���ʡ���� MOSFET ������ IC �ijɱ��Ϳռ䡣
LTC3714 �������������ԣ������ڲ��۷��������ơ������ѹ�Ƚ���������һ����ѡ�Ķ�·ͣ����ʱ����50 �� VID ����λ�� 25.0V �� 6.1V ��Χ���� 75mV �� <>mV ������������б�̡�
ͼ 1 ��ʾ��ʹ�� LTC3714 ��Ըߴ� 20A �� CPU ����������ԭ��ͼ������ƽ�ʹ�� 8 �� SO-7811 FET ��IRF4A����1 ����ƽ������� 3 ������� SP ���ݡ�С�źž���� Q5�CQ3714 �� Q4 �� LTC6 ���ڲ��˷����ʹ�ã���ʵ�ֲ�ͬ�Ľ���ѡ�Q100��Q2�����˳�ģʽת���ڼ����80��s��ë�̡�ͼ2��ʾ��Ч�ʺ���˲̬��Ӧ�IJ��Խ������ 21A �� 1A �ĸ��ط�Χ�ڣ����Ϊ 40.100V��Ч�ʱ����� <>% ���ϡ����ڲ���AVP�������ѹ�仯С��<>mVP-P�����ص����� 8A �� 23A ֮�䲽��ʱ��
ͼ1.LTC3714 IMVP ���������
ͼ 2a.ͼ1��·��Ч���븺�ص����Ĺ�ϵ��
ͼ 2b.ͼ1��·�ĸ���˲̬��Ӧ���Ρ�
LTC3716 ˫�� IMVP �������
LTC3716 רΪ��Ҫ 20A �� 40A CPU �����Ļ������ܵ� IMVP Ӧ�ö���ơ�����������С�͡���ƽ��խ SSOP 36 ���ŷ�װ��ÿ��������������������ͬ����ѹ��·180�����ࡣ���������ķ�ֵ����ģʽ���ƣ���ȷ��������ѹ��֮������þ������������м������ĸ��ߵ��� N-MOSFET ��������������ȵؼ�С��Դ������ߴ硣��������·�ɷ�ֹ�����͵ײ� FET ͬʱ��ͨ��LTC3716 ���ṩ��һϵ�зḻ�Ĺ��ܣ�����һ�� PGOOD �źš�������ѹ�������۷��������ƺͿɽ��õĹ������������������в�������ͨ��ͻ��ģʽ™�Ḻ�ز�����������ȵؼ��� CPU ��������ģʽʱ�Ĺ�����ġ���Щ����ʹ���豸���ƶ�����Ӧ���ر�����������
ͼ3��ʾ��25A˫���ƶ�CPU�ں˵�Դ������ԭ��ͼ�������� 8 �� IC��7811 �������� SO-1 MOSFET ��IRF82A�� �� 15 �� 1��H ��ƽ������װ�������40V ����� 25.80V/2A �����Ч��ԼΪ 25%���� 12A �� 14A �ĸ��ط�Χ�ڿɱ��ֳ��� 16% ��Ч�ʡ�Q<>�CQ<> �� Q<> ���ڲ�����Ŵ������ʹ�ã���ѡ��ͬ�Ľ���ѡ�
ͼ3.LTC3716 IMVP ���������
ͼ4a��4b�ֱ���ʾ��ͼ3��·��ʵ��Ч�ʺ���˲̬��Ӧ���õ�·ֻ������SP���ݣ���������2A���ؽ�Ծ��IMVP15������ڹ淶�������ص�����1A��Ϊ383Aʱ�������ѹ��1.273V��Ϊ8.23V��
ͼ 4a.ͼ3��·��Ч���븺�ص����Ĺ�ϵ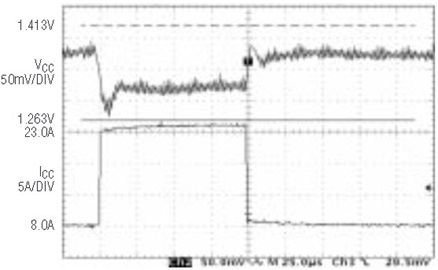
ͼ 4b.ͼ3��·�ĸ���˲̬��Ӧ���Ρ�
��1�Ƚ��˵����˫�������20V�����1.6V��25A����µĹؼ����ܡ�˫�༼���ɽ�ʡ����������ݣ�270��F/2V��SP ���ݣ�������������ݣ�10��F/35V��Y5V��������ͬ������ MOSFET ��IRF7811A�� ����ͬ�Ŀ���Ƶ���£�˫����������ʵ�ָ��ߵ�Ч�ʡ�˫���·�ĸ�Ч��������ȵĵ����ֲ����ϣ������MOSFET�͵������������
|
�淶 |
����� |
˫�� | |
|
�����Ʋ����� ��A��Чֵ) |
8 |
5 | |
|
��ЧӦ������ |
6 |
6 | |
|
������������� |
6 |
4 | |
|
������������� |
6 |
4 | |
|
��1 |
80% |
83% | |
|
�¶�2 |
��Ӧ�� |
110��C |
70��C |
|
��ЧӦ�� |
104��C |
70��C | |
|
1. 20V���룬1.6V/25A��� |
|||
����
�µ� IMVP �淶Ҫ����õ�Դ��ƣ�������ȵؼ��ٲ�ͬ����ģʽ�µĹ�����ġ����� LTC3714 �� LTC3716 �Ľ�������ܹ�����С�ijɱ�����������Ҫ��LTC3714 �ʺ��������ƶ��ԵıʼDZ����ԣ��� LTC3716 ��Ϊ�������ܵıʼDZ������ṩ����ѵ�Դ�����������Ϊ��ͬʱʵ���˸�Ч�ʡ�С�ߴ�͵ͽ�������ɱ����봫ͳ�ĵ�����������ȣ�˫�������������������������ݣ�����ȵؼ����˹�����ģ������˵������ʱ�䣬�������PCB�ij��ڿɿ��ԡ�����CPU����Ҫ����ߣ�˫��������������δ�������ƶ�CPU�Ĺ���Ҫ���⣬����˫����������������δ������������������Ƹ���Ƶ��CPU��Դ�Ŀ����ԡ�
��������
����ϲ��





